여러 주체가 하나의 데이터를 동시에 접근하려는 경우를 Race Condition(경쟁 상태)이라고 한다.
데이터의Race condition이 있으면 데이터의 최종 연산 결과는 마지막에 그 데이터를 다룬 프로세스에 따라 달라진다. 즉, 결과가 접근의 순서에 의존적이다. -> 결과가 안정적이지 않다.
따라서 Race condition을 막기 위해서는 Concurrent process는 동기화(Synchronize)되어야 한다.
멀티 프로세서 시스템에서
-
공유 메모리를 사용하는 프로세스들 간
-
커널 내부 데이터를 접근하는 루틴들 간에
e.g) 커널 모드 수행 중 인터럽트로 커널 모드가 다른 루틴을 수행 시
Race condition이 발생할 수 있다.
구체적으로 다음과 같은 세 가지 경우를 볼 수 있다.
Kernel 수행 중 인터럽트 발생 시

e.g) 커널 모드가 수행되는 도중에 인터럽트가 발생해 인터럽트를 처리하는 경우
커널에서 Count변수를 ++하려고 load한 뒤 인터럽트가 발생해서 Interrupt handler가 Count--를 하면 어떻게 될까? 인터럽트가 수행된 후 커널에서는 이미 load한 값을 처리하기 때문에 Count--는 반영되지 않는다.
- 양쪽 다 커널 코드이므로
kernel address space를 공유한다.
Race condition 해결 방법
인터럽트가 들어와도 인스트럭션이 처리되기 전까지는 인터럽트를 처리하지 않도록 한다.
프로세스가 System call을 하여 kernel mode로 수행중일 때 Context switch 가 일어나는 경우

Race condition 해결 방법
이 경우에는 프로세스가 커널 모드로 수행 중일 때는
CPU를 뺏기지않도록(preempt)하지 않는다. 커널 모드에서 사용자 모드로 복귀할 때preempt한다.
Multiprocessor 에서 Shared memory 내의 kernel data에 접근할 경우

Race condition 해결 방법
1) 한 번에 하나의
CPU만이 커널에 들어갈 수 있게 한다.2) 커널 내부에 있는 각 공유 데이터에 접근할 때마다 그 데이터에 대한
lock/unlock을 한다.
Process Synchronization 문제
공유 데이터(shared data)의 동시 접근(concurrent access)은 데이터의 불일치 문제(inconsistency)를 발생시킬 수 있다.
일관성 유지를 위해서는 협력 프로세스간의 실행 순서를 정해주는 메커니즘이 필요하다.
Critical-Section Problem
Critical-Section 이란 공유 데이터에 접근하는 코드를 말한다.
각 프로세스의 code segment에는 공유 데이터를 접근하는 코드인 Critical-Section이 존재한다.
General structure of a typical process
do{
entry section
critical section
exit section
reamainder section
} while(true);
Critical section Problem 해결을 위한 충족 조건
Mutual Exclusion(상호 배제)
프로세스가 ciritical section 부분을 수행중이면 다른 모든 프로세스들은 그들의 critical section에 들어가면 안된다.
Progress(진행)
아무도 critical section에 있지 않은 상태에서 critical section에 들어가고자 하는 프로세스가 있으면 critical section에 들어가게 해주어야 한다.
아무도
critical section에 들어가지 못하는 경우가 없어야 한다.
Bounded Waiting(유한 대기)
프로세스가 critical section에 들어가려고 요청한 후부터 그 요청이 허용될 때까지 다른 프로세스들이 critical section에 들어가는 횟수에 한계가 있어야 한다.
starvaton에 대한guarantee가 있어야 한다.
가정
- 모든 프로세스의 수행 속도는 0보다 크다.
- 프로세스들 간의 상대적인 수행 속도는 가정하지 않는다.
Algorithm 1 - Strict Alternation
사용하는 변수
int turn;

turn이 i이면 프로세스 i가 critical section에 들어간다. 프로세스 i가 critical section에서 빠져 나오면 turn을 j로 바꿔줌과 동시에 프로세스 j가 critical section에 들어가게 된다.
이 방식은 Mutual Exclusion은 충족한다. 하지만 Progress를 충족하지 못한다.
이 알고리즘은 반드시 프로세스가 교대로 critical section에 들어간다.
e.g) 프로세스 i가 빈번히 critical section에 들어가려 하고 프로세스 j는 critical section에 들어가지 않으려 하면 프로세스 i는 영원히 critical section에 들어가지 못하는 상황이 발생한다.
Algorithm 2
사용하는 변수
int turn;
boolean flag[2];- 초기에 모두false
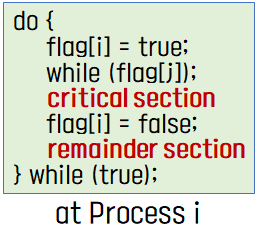
프로세스 i가 critical section에 들어가고자 할 때 flag[i]를 true로 바꾼다.
프로세스 j가 critical section에 들어가 있는지 체크한다.
critical section에서 빠져 나오면 flag[i]를 false로 바꿔준다.
이 경우에도 Mutual Exclusion은 충족하지만 Progress 를 만족하지 못한다.
e.g) flag가 모두 true인 경우 아무 프로세스도 critical section에 들어가지 못할 수도 있다.
Algorithm 3 - Peterson's Algorithm
사용하는 변수
int turn;
boolean flag[2]; - 초기에 모두 false

critical section에 들어가기 전에 flag와 turn을 모두 확인한다.
이 경우에는 세가지 조건을 모두 만족시킨다.
Mutual Exclusion
프로세스 i는 flag[j] == false || turn == i 인 경우에만 critical section에 들어갈 수 있다.
만약 두 프로세스가 동시에 critical section에 들어간다면,
flag[i] ==flag[j]==true(모순) && turn==i and turn==j(모순)
Progress
flag[j] = false라면 프로세스 j는 critical section에 들어갈 마음이 없는 것이다. 따라서 프로세스 i에서 while문에 걸리지 않는다.
Bounded Waiting
프로세스가 한 번만 critical section에 들어가면 다음부턴 무조건 critical section에 들어갈 수 있다.
문제점 - Busy Waiting(=spin lock)
while문을 돌면서 기다리기 때문에 계속 CPU와 메모리를 쓰면서 기다리게 된다.
Synchronization Hardware
하드웨어적으로 하나의 인스트럭션만 주어지면 이러한 critical section문제는 쉽게 해결된다. Test & Modify를 atomic하게 수행할 수 있도록 지원하면 된다.
Race condition은 사실상 데이터를 읽고 쓰는 것을 하나의 인스트럭션으로 처리할 수 없기 때문에 생겼던 것이다.
Test_and_set(a)
a라는 데이터의 현재값을 읽고, a의 값을 1로 바꾸어주는 것을 하나의 인스트럭션으로 처리한다.
단, 이러한 하나의 큰 인스트럭션을 만들어 수행하게 되면 clock cycle이 증가한다.
Mutex Locks(=Lock)
프로세스는 critical section에 들어갈 때 반드시 lock을 획득하고, 나올 때 lock을 반납해야 한다.
do{
acquire lock
critical section
release lock
remainder section
} while(true);- acquire()에서 busy waiting 이 존재한다. 또한, bounded-waiting을 만족시키지 않는다.
* busy waiting: 반복문을 돌면서 다른 프로세스를 기다리는 것이다. 장점으로는 반응속도가 빠르다는 것이 있다. 반면에 단점으로는 CPU 사이클을 낭비하게 된다.
Semaphore
앞의 방식들을 추상화시킨 일종의 추상 자료형이다.
크게 두 종류의 세마포어가 있다.
Counting semaphore- 도메인이 0 이상인 임의의 정수값
- 주로
resource counting에 사용된다.
Binary semaphore(= mutex)- 0 또는 1 값만 가질 수 있는 세마포어
- 주로
mutual exclusion (lock/unlock)에 사용된다.
Semaphore S
-
정수 자료형 - 여러 개의 프로세스를 처리할 수 있다.
-
아래의 두 가지
atomic연산에 의해서만 접근 가능하다.wait(S): while (S <= 0) do no-op; //busy wait //P(S) S--; signal(S): //V(S) S++;
wait() 연산은 세마포어를 획득하는 연산이고,
signal() 연산은 세마포어를 반납하는 연산이다.
이 방식도 busy waiting(=spin lock)이 있어 비효율적이다.
이에 대한 해결책으로 Block & Wakeup 방식의 구현이 있다. (=sleep lock)
Block & Wakeup
공유 데이터를 얻길 기다리는 프로세스 자체를 Blocked(CPU를 얻을 수 있는 자격 자체가 사라진다.)하는 방법이다.

block과 wakeup을 다음과 같이 가정한다.
block- 커널은block을 호출한 프로세스를suspend시킨다. 이 프로세스의PCB를 세마포어에 대한wait queue에 넣는다.wakeup(P)-block된프로세스 P를wakeup시킨다. 이 프로세스의PCB를ready queue로 옮긴다.


-
wait()- 자원의 여분이 없다면block상태가 된다. -
signal()- 자원을 반납하고, 자원을 기다리는 프로세스가 있다면 그 프로세스를 깨워(wakeup(P))준다.
Busy-wait vs. Block/wakeup
Block/wake up overhead vs. Critical section의 길이
critical section의 길이가 긴 경우Block/wakeup이 적당하다.critical section의 길이가 매우 짧은 경우Block/wakeup의 오버헤드가busy-wait오버헤드보다 더 커질 수 있다.- 일반적으로는
Block/wakeup방식이 더 좋다.
Deadlock and Starvation on Semaphore
Deadlock - 둘 이상의 프로세스가 서로 상대방에 의해 충족될 수 있는 event를 무한히 기다리는 현상
자신이 잡은 자원을 내놓지 않고 서로 상대방의 자원을 기다리는 현상이다. 이는 세마포어 로직 자체의 문제는 아니다.
Starvation(Indefinite blocking) - 프로세스가 suspend된 이유에 해당하는 세마포어 큐에서 빠져나갈 수 없는 현상.
본 포스팅은 이화여대 반효경 교수님의 강의와 경북대 탁병철 교수님의 강의를 토대로 작성한 글입니다.
'Computer Science > 운영체제' 카테고리의 다른 글
| [운영체제] CH7. Deadlock (0) | 2020.08.15 |
|---|---|
| [운영체제] CH6. Process Synchronization(2) (0) | 2020.08.13 |
| [운영체제] CH5. CPU Scheduling(2) (0) | 2020.08.03 |
| [운영체제] CH5. CPU Scheduling(1) (0) | 2020.08.02 |
| [운영체제] CH4. Process Management (0) | 2020.07.30 |



